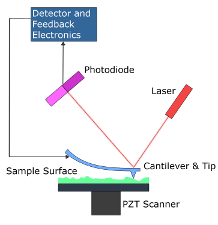
The AFM, which has been invented in 1986 by G. Binning,
C. Quate and C. Gerber, uses the reflection of a laser beam
from an oscillating cantilever to create a 3D image of the
surface. This setup allows to investigate structures on the
nanometer scale.
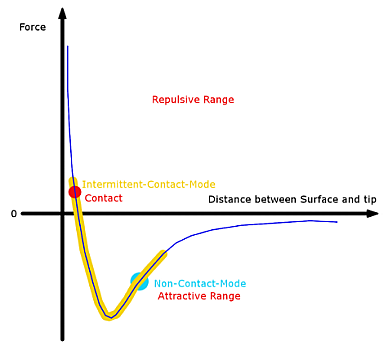
As the most crucial part the tip of the
cantilever interacts with the surface, which causes the
position of the laser spot to be changed. Depending on the
distance between the sample surface and the tip, the
cantilever behaves like a spring, with a spring constant of
about 0.005N/m ~ 40N/m. There are several competing
interactions, which can be distinguished depending on the
range they dominate, i.e. relatively long range attractive
interactions (van der Waals and other forces), and a repulsive
short range interaction.